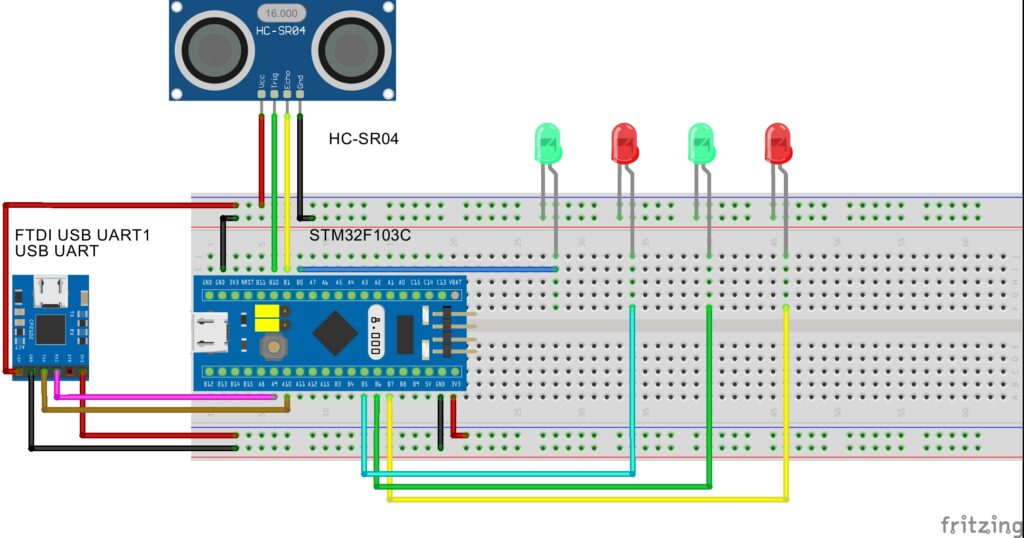
Ultrasonic Sensor Interfacing With STM32 / Stm32 / By Gadgets In Details Circuit Diagram: Code: const int pingPin = PB10; const int echoPin = PB1; const int LED1 = PB0; const int LED2 = PB5; const int LED3 = PB6; const int LED4 = PB7; void setup() { pinMode(LED1 , OUTPUT); pinMode(LED2 , OUTPUT); pinMode(LED3 , OUTPUT); pinMode(LED4 , OUTPUT); Serial.begin(115200); // Starting Serial Terminal } void loop() { long duration, distance; pinMode(pingPin, OUTPUT); digitalWrite(pingPin, LOW); delayMicroseconds(2); digitalWrite(pingPin, HIGH); delayMicroseconds(10); digitalWrite(pingPin, LOW); pinMode(echoPin, INPUT); duration = pulseIn(echoPin, HIGH); Serial.print("Distance from the object = "); distance = microsecondsToCentimeters(duration); Serial.print(distance); Serial.print("cm"); Serial.println(); if ( distance <= 7 ) { digitalWrite(LED1, HIGH); } else { digitalWrite(LED1, LOW); } if ( distance <= 14 ) { digitalWrite(LED2, HIGH); } else { digitalWrite(LED2, LOW); } if ( distance <= 21 ) { digitalWrite(LED3, HIGH); } else { digitalWrite(LED3, LOW); } if ( distance <= 28 ) { digitalWrite(LED4, HIGH); } else { digitalWrite(LED4, LOW); } delay(100); } long microsecondsToCentimeters(long microseconds) { return microseconds / 29 / 2; }